Servo - PCA9685
Breadboard for "Servo - PCA9685"
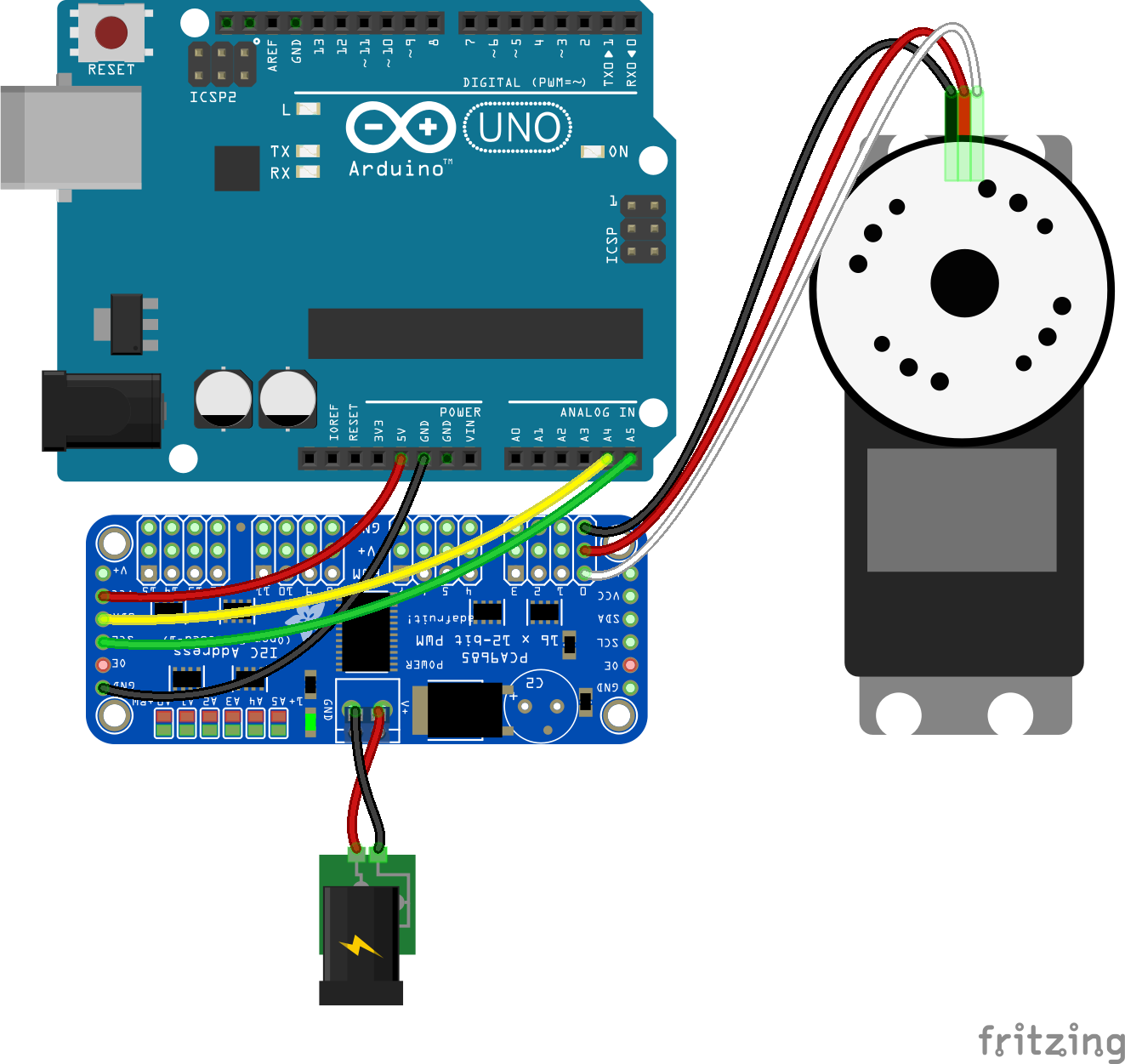
Fritzing diagram: docs/breadboard/servo-PCA9685.fzz
Run with:
node eg/servo-PCA9685.js
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
console.log("Connected");
// Initialize the servo
var servo = new five.Servo({
address: 0x40,
controller: "PCA9685",
pin: 0,
});
// Add servo to REPL for live control (optional)
this.repl.inject({
servo: servo
});
// Servo API
// min()
//
// set the servo to the minimum degrees
// defaults to 0
//
// eg. servo.min();
// max()
//
// set the servo to the maximum degrees
// defaults to 180
//
// eg. servo.max();
// center()
//
// centers the servo to 90°
//
// servo.center();
// to( deg[, duration] )
//
// Moves the servo to position by degrees
// duration (optional) sets duration of movement.
//
// servo.to( 90 );
// step( deg )
//
// Moves the servo step degrees relative to current position
//
// servo.step( -10 );
// sweep( obj )
//
// Perform a min-max cycling servo sweep (defaults to 0-180)
// optionally accepts an object of sweep settings:
// {
// lapse: time in milliseconds to wait between moves
// defaults to 500ms
// degrees: distance in degrees to move
// defaults to 10°
// }
//
servo.sweep();
});
// References
//
// http://servocity.com/html/hs-7980th_servo.html
License
Copyright (c) 2012, 2013, 2014 Rick Waldron waldron.rick@gmail.com Licensed under the MIT license. Copyright (c) 2014, 2015 The Johnny-Five Contributors Licensed under the MIT license.