Servo - Leg Animation
Servos on pins 9, 10, 11
Basic example with servos connected to pins 9, 10, and 11. Requires servos on pins that support PWM (usually denoted by ~).
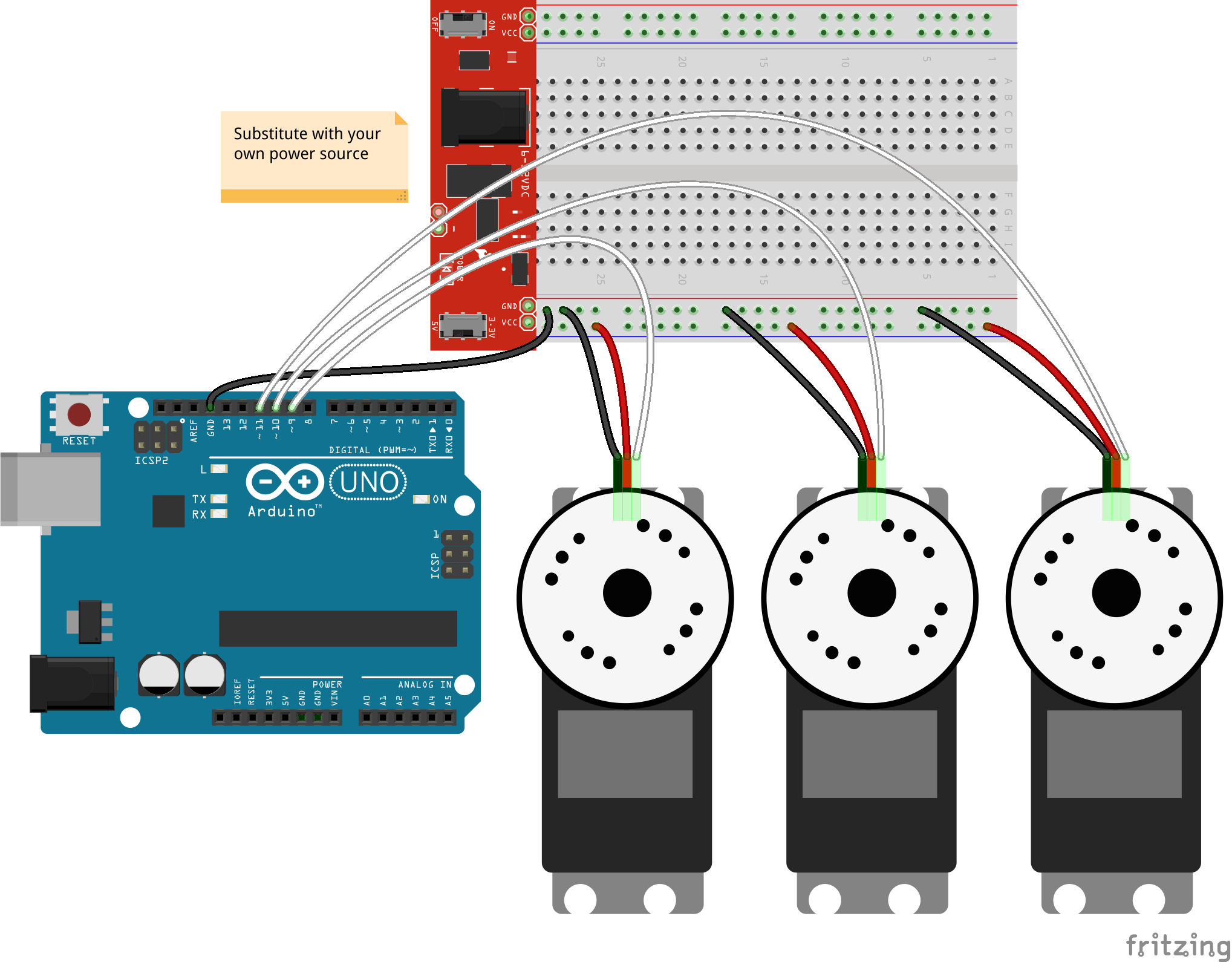
Fritzing diagram: docs/breadboard/servo-three.fzz
Run with:
node eg/servo-animation-leg.js
var five = require("johnny-five"),
ph = {
state: "sleep"
};
var board = new five.Board().on("ready", function() {
/**
* This animation controls three servos
* The servos are the coxa, femur and tibia of a single
* leg on a hexapod. A full hexapod might need 18
* servo instances (assuming 3 degrees of freedom)
*/
ph.coxa = new five.Servo({
pin: 9,
startAt: 45
});
ph.femur = new five.Servo({
pin: 10,
startAt: 180
});
ph.tibia = new five.Servo({
pin: 11,
startAt: 180
});
// Create a Servo.Array for those leg parts
ph.leg = new five.Servo.Array([ph.coxa, ph.femur, ph.tibia]);
/**
* Create an Animation(target) object. A newly initialized
* animation object is essentially an empty queue (array) for
* animation segments that will run asynchronously.
* @param {target} A Servo or Servo.Array to be animated
*/
var legAnimation = new five.Animation(ph.leg);
/**
* This object describes an animation segment and is passed into
* our animation with the enqueue method. The only required
* property is keyFrames. See the Animation wiki page for a full
* list of available properties
*/
var sleep = {
duration: 500,
cuePoints: [0, 0.5, 1.0],
oncomplete: function() {
ph.state = "sleep";
},
keyFrames: [
[null, false, { degrees: 45, easing: "outCirc" }],
[null, { degrees: 136, easing: "inOutCirc" }, { degrees: 180, easing: "inOutCirc" }],
[null, { degrees: 120, easing: "inOutCirc" }, { step: 60, easing: "inOutCirc" }]
]
};
/**
* Another animation segment
*/
var stand = {
duration: 500,
loop: false,
cuePoints: [0, 0.1, 0.3, 0.7, 1.0],
oncomplete: function() {
ph.state = "stand";
},
keyFrames: [
[null, { degrees: 66 }],
[null, false, false, { degrees: 130, easing: "outCirc"}, { degrees: 104, easing: "inCirc"}],
[null, false, { degrees: 106}, false, { degrees: 93 }]
]
};
// Functions we can call from the REPL
ph.sleep = function() {
legAnimation.enqueue(sleep);
};
ph.stand = function() {
legAnimation.enqueue(stand);
};
// Inject the `servo` hardware into;
// the Repl instance's context;
// allows direct command line access
board.repl.inject({
ph: ph
});
console.log("Try running ph.stand() or ph.sleep()");
});
License
Copyright (c) 2012, 2013, 2014 Rick Waldron waldron.rick@gmail.com Licensed under the MIT license. Copyright (c) 2014, 2015 The Johnny-Five Contributors Licensed under the MIT license.