Gyro - I2C MPU6050
Breadboard for "Gyro - I2C MPU6050"
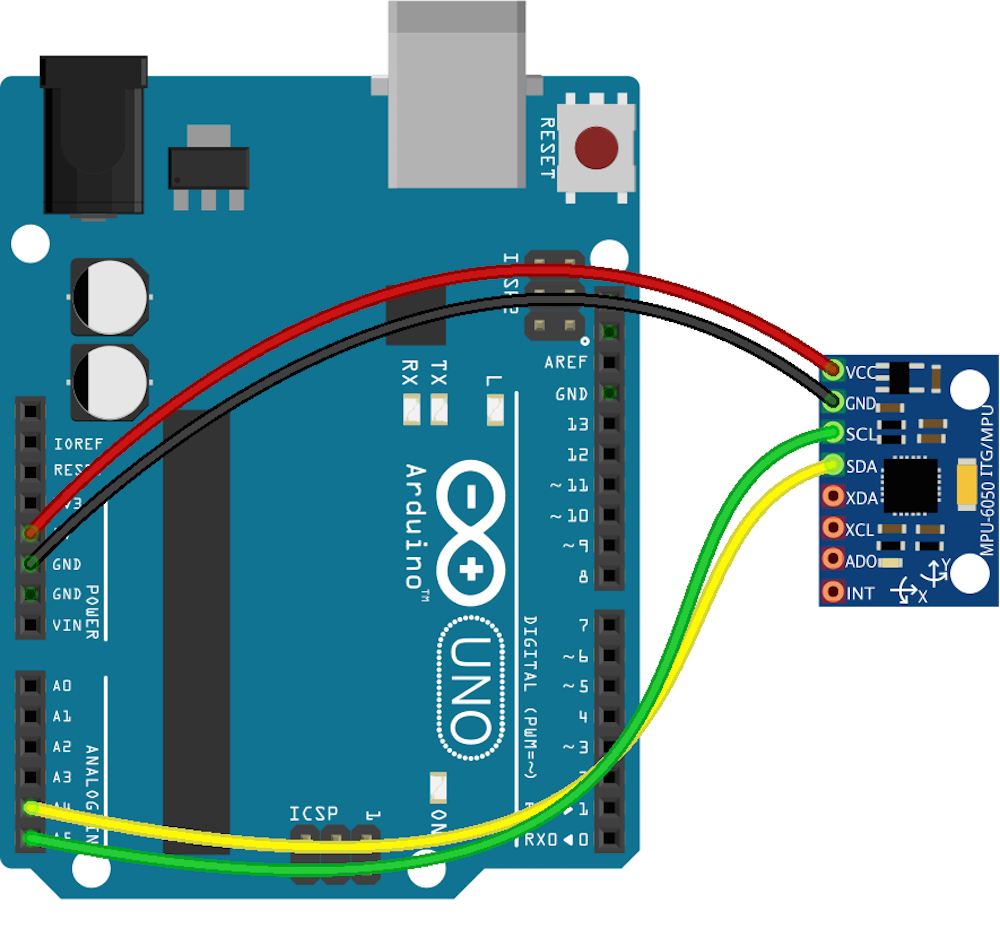
Fritzing diagram: docs/breadboard/gyro-mpu6050.fzz
Run this example from the command line with:
node eg/gyro-mpu6050.js
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var gyro = new five.Gyro({
controller: "MPU6050"
});
gyro.on("change", function() {
console.log("gyro");
console.log(" x : ", this.x);
console.log(" y : ", this.y);
console.log(" z : ", this.z);
console.log(" pitch : ", this.pitch);
console.log(" roll : ", this.roll);
console.log(" yaw : ", this.yaw);
console.log(" rate : ", this.rate);
console.log(" isCalibrated : ", this.isCalibrated);
console.log("--------------------------------------");
});
});
License
Copyright (c) 2012, 2013, 2014 Rick Waldron waldron.rick@gmail.com Licensed under the MIT license. Copyright (c) 2016 The Johnny-Five Contributors Licensed under the MIT license.