Kinect Robotic Arm Controller
Breadboard for "Kinect Robotic Arm Controller"
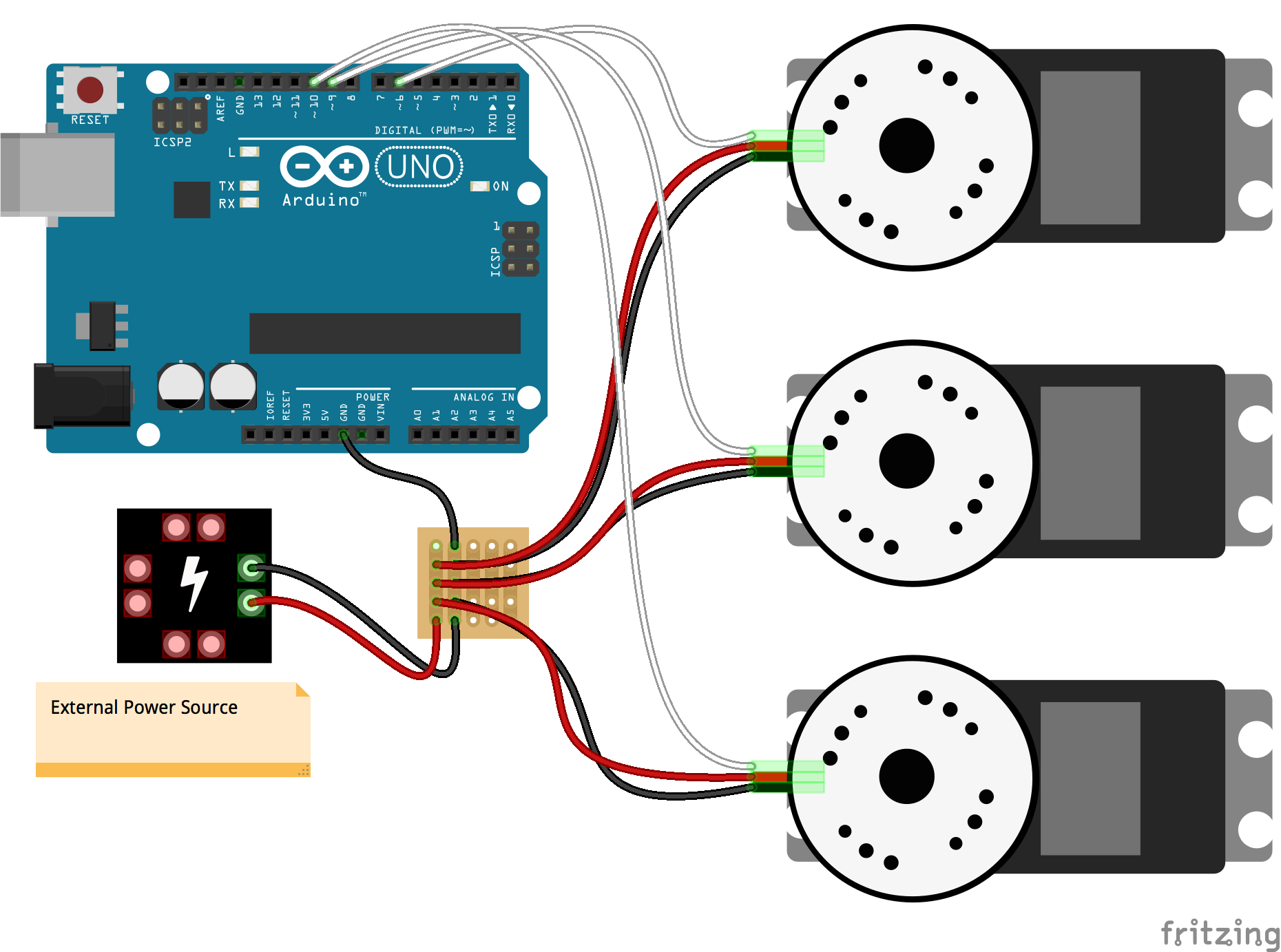
Fritzing diagram: docs/breadboard/kinect-arm-controller.fzz
Run this example from the command line with:
node eg/kinect-arm-controller.js
var five = require("johnny-five");
/**
* PVector is a slightly-ported version of
* Processing's PVector.
*/
var PVector = require("./pvector").PVector;
/**
* To run this program you must first install
* libusb and OpenNI... Good luck with that.
*
* Two sets of instructions are available:
* - https://github.com/OpenNI/OpenNI
* - https://code.google.com/p/simple-openni/wiki/Installation
*/
var OpenNI = require("openni");
/**
* Skeletons
* @type Array An array of completed skeletons
*/
var Skeletons = [];
var status = {
true: "IN FRAME",
false: "OUT OF FRAME"
};
var board = new five.Board();
board.on("ready", function() {
var servos = {
rotator: new five.Servo({
pin: 6,
range: [0, 180],
startAt: 90
}),
upper: new five.Servo({
pin: 9,
range: [0, 180],
startAt: 180
}),
fore: new five.Servo({
pin: 10,
range: [90, 180],
startAt: 90
}),
};
var kinect = new OpenNI();
// For each declared Skeleton.Joints, bind
// an event handler to the joint event by name.
Skeleton.Joints.forEach(function(joint) {
// When joint data is received, update the
// associated Skeleton's joints array
// with data for the given joint.
kinect.on(joint, function(id, x, y, z) {
var skeleton, vector;
skeleton = Skeletons[id];
if (skeleton) {
vector = skeleton.joints[joint];
if (vector) {
vector.x = x;
vector.y = y;
vector.z = z;
}
}
});
});
Skeleton.Events.forEach(function(type) {
kinect.on(type, function(id) {
var isPresence, skeleton;
// Limit the number of skeletons to one.
if (id !== 1) {
return;
}
console.log("%s (%d)", type, id);
isPresence = ["newuser", "lostuser"].some(function(val) {
return val === type;
});
if (isPresence) {
skeleton = Skeletons[id];
if (!skeleton) {
skeleton = Skeletons[id] = new Skeleton();
}
skeleton.inFrame = type === "newuser" ?
true : false;
console.log(status[skeleton.inFrame]);
}
});
});
var last = Date.now();
var interval = 1000 / 30;
var rlow = 0;
var rhigh = 0;
var change = {
rotator: new Change(2),
upper: new Change(2),
fore: new Change(2),
};
void (function main() {
setImmediate(main);
var joints, right, orientation, upper, fore, rotator, axis;
var now = Date.now();
if (now < last + interval) {
return;
}
last = now;
var values = {
upper: 0,
fore: 0,
rotator: 0
};
var angles = {
upper: 0,
fore: 0
};
if (Skeletons.length && (joints = Skeletons[1].joints)) {
upper = joints.right_shoulder;
fore = joints.right_elbow;
rotator = joints.right_hand;
axis = joints.right_hip;
if (upper && fore && rotator && axis) {
right = {
upper: new PVector(upper.x, upper.y),
fore: new PVector(fore.x, fore.y),
rotator: new PVector(rotator.x, rotator.y),
axis: new PVector(axis.x, axis.y)
};
orientation = {
torso: PVector.sub(right.upper, right.axis),
arm: PVector.sub(right.fore, right.upper)
};
if (rlow === 0 || rlow > rotator.z) {
rlow = Math.round(rotator.z);
}
if (rhigh === 0 || rhigh < rotator.z) {
rhigh = Math.round(rotator.z);
}
angles.upper = Math.round(
angleOf(right.fore, right.upper, orientation.torso)
);
angles.fore = Math.round(
angleOf(right.rotator, right.fore, orientation.arm)
);
values.upper = scale(angles.upper, 0, 180, 180, 0);
values.fore = scale(angles.fore, 180, 0, 90, 180);
// When the elbow/hand are higher then the shoulder,
// flip the scaled rotator value.
values.rotator = values.upper < 110 && values.fore > 110 ?
scale(rotator.z, rlow, rhigh, 180, 0) :
scale(rotator.z, rlow, rhigh, 0, 180);
// Once all of the Kinect joint vectors have been
// calculated and scaled to a value in degrees,
// do a final check to ensure that a move is worth
// making and if so, set the servo position
//
if (change.rotator.isNoticeable(values.rotator)) {
servos.rotator.to(values.rotator);
}
if (change.upper.isNoticeable(values.upper)) {
servos.upper.to(values.upper);
}
if (change.fore.isNoticeable(values.fore)) {
servos.fore.to(values.fore);
}
}
}
})();
// References
// http://www.ranchbots.com/robot_arm/images/arm_diagram.jpg
// https://github.com/OpenNI/OpenNI/blob/master/Include/XnCppWrapper.h
// http://www.mrtmrcn.com/en/post/2011/11/08/Kinect-Part-5-Kinect-Skeleton-Tracking.aspx
// http://code.google.com/p/bikinect/source/browse/trunk/MappInect/Skeleton.pde
// https://github.com/Sensebloom/OSCeleton-examples/blob/master/processing/Stickmanetic/Stickmanetic.pde
// http://www.pcl-users.org/openni-device-h-47-26-fatal-error-XnCppWrapper-h-No-such-file-or-directory-td3174297.html
// http://kinectcar.ronsper.com/docs/openni/_xn_cpp_wrapper_8h_source.html
});
/**
* Joint
* @param {Object} initializer { [x, [y, [z]]] }
*/
function Joint(initializer) {
Object.assign(this, Joint.DEFAULTS, initializer || {});
}
Object.freeze(
Joint.DEFAULTS = {
x: 0,
y: 0,
z: 0
}
);
/**
* Skeleton
*
* Initialize a "collection" of Joint objects
* as a cohesive data type
*
* @param {Object} initializer { joints = {} }
*/
function Skeleton(initializer) {
/**
* skeleton {
* joints, kinect
* }
*/
five.Fn.assign(
this, Skeleton.DEFAULTS, initializer || {}
);
// Initialize each declared Joint in Skeleton.Joints
Skeleton.Joints.forEach(function(joint) {
this.joints[joint] = new Joint();
}, this);
}
Object.freeze(
Skeleton.DEFAULTS = {
inFrame: false,
joints: {}
}
);
Skeleton.Joints = [
"head",
"neck",
"torso",
"waist",
"left_shoulder",
"left_elbow",
"left_hand",
"right_shoulder",
"right_elbow",
"right_hand",
"left_hip",
"left_knee",
"left_foot",
"right_hip",
"right_knee",
"right_foot"
];
Skeleton.Events = [
"newuser",
"lostuser",
"posedetected",
"calibrationstart",
"calibrationsuccess",
"calibrationfail"
];
/**
* Change
*
* Produces change "tracking" instances
* to determine if a given value has changed
* drastically enough
*/
function Change(margin) {
this.last = 0;
this.margin = margin || 0;
}
/**
* isNoticeable
*
* Determine if a given value has changed
* enough to be considered "noticeable".
*
* @param {Number} value [description]
* @param {Number} margin Optionally override the
* change instance's margin
*
* @return {Boolean} returns true if value is different
* enough from the last value
* to be considered "noticeable"
*/
Change.prototype.isNoticeable = function(value, margin) {
margin = margin || this.margin;
if (!Number.isFinite(value)) {
return false;
}
if ((value > this.last + margin) || (value < this.last - margin)) {
this.last = value;
return true;
}
return false;
};
/**
* scale Alias
*/
var scale = five.Fn.scale;
/**
* angleOf
*
* Produce the angle of 2 vectors on a given axis.
*
* @param {PVector} vec1
* @param {PVector} vec2
* @param {PVector} axis
*
* @return {Number} Radians converted to degrees
*/
function angleOf(vec1, vec2, axis) {
return PVector.degrees(
PVector.between(
PVector.sub(vec2, vec1), axis
)
);
}
Illustrations / Photos
Robotic Arm
Assembled Robotic Arm from LynxMotion

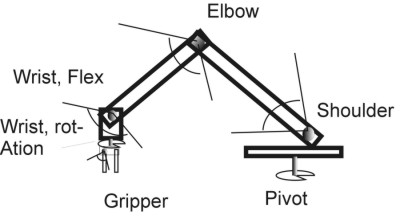
Arm Diagram
Illustrates arm joint connections.
Learn More
License
Copyright (c) 2012, 2013, 2014 Rick Waldron waldron.rick@gmail.com Licensed under the MIT license. Copyright (c) 2016 The Johnny-Five Contributors Licensed under the MIT license.